図・数式の拡大バージョンはこちらです。また、印刷はそちらの方が鮮明です。
惑星探査機の航行に利用されるスイングバイ航法について説明します。これは運動量保存則の例です。
スイングバイ理解の[第1の鍵]は“運動量保存則”です。
(1)m1>>m2の場合

となり、m1はその速度を維持し、m2はぶつかる前の相対速度で弾き跳ばされるので、m1が持っていた速度との和になり増速する。例えば最初m2が静止していたらv2'=2v1、m2が左方向にm1と同じ速さ−v1で動いていたらv2'=3v1となる。
(2)m1=m2の場合
![]()
となり、速度を交換する。
(3)m1<<m2の場合

となり、m2はその速度を持続し、m1はぶつかる前の相対速度で弾き返されるので、m2が持っていた速度との差になる。そのためm1の速度は最初持っていた速度より遅くなる。
これは高校物理の練習問題ですが、(1)が、スイングバイの原理を示している。m1が惑星、m2が惑星探査機と考えれば、スイングバイ航法とは小さな惑星探査機が巨大な惑星に衝突されてはじき飛ばされる現象です。旨くやれば、探査機は惑星の公転速度の2倍以上の速度を得ることができる。そのぶん惑星の運動エネルギーと運動量は減少するが、質量が巨大故にそのことで生じる惑星の速度変化は無視できる。
スイングバイ航法の本質は運動量保存則です。[運動の法則]、[運動量保存則]、[エネルギー保存則]は同等の内容を別な方向から見ているのですが、この現象の理解には運動量保存則の見方が最も適している。
そのとき、エネルギー保存則は跳ね返り係数e=1の完全弾性衝突を代弁している(別稿「力積と運動量」参照)。惑星と探査機の相互作用は完全弾性衝突の例ですが、二次元、三次元の衝突では跳ね返り係数が定義できないので、“跳ね返り係数”の代わりに“エネルギー保存則”を利用する。
二次元の運動でもう少し詳しく説明する。スイングバイを理解する[第2の鍵]は“ガリレオの相対性原理”です。ガリレオの相対性原理とは「運動座標系の速度が光速度に比べてゆっくりの場合には、物理現象を静止した座標系から眺めても、等速直線運動をしている座標系から眺めても、同一の運動法則に従っているように見える」ということです。
これは、惑星と共に動く座標系(その座標系では惑星は静止している。)で探査機の運動を論じ、その結論をそのまま太陽静止(惑星が公転速度で動いているように見える)の座標系に移せば良いことを言っている。だから、まず静止している惑星の回りの探査機の運動を論じる。
話を具体的にするために、スイングバイをさせる惑星を木星とする。木星から無限遠離れた位置(実際には0.2天文単位程度離れれば無限遠とみなせる)での探査機の速度をv0として、様々な侵入距離p(下図)で木星に接近させて軌道の変化する様子を調べる。ちなみに与える速度は木星の公転速度(v=1.3×104m/s)と同程度の速度とする。
探査機の速度が無限遠点でゼロなら探査機の飛行軌道は放物線に、有限速度なら双曲線となる。厳密に論じるには軌道が双曲線軌道になることから証明しなければならないが、ここでは、探査機の軌道は双曲線軌道を描くことは解っているとして運動量保存則とエネルギー保存則から何が言えるかを調べてみる。考え方は別稿「質点の二次元運動(放物運動、楕円運動)」3.(3)の楕円軌道や、「ラザフォードのα線散乱実験と有核原子モデル」5.(2)の双曲線軌道と同様です。
このとき、探査機は図の方向に飛び去り最終的に初速v0と同じ速度で木星から離れていく(木星静止の座標系から見て)。このとき
となる。上式のpを偏向角θと関係づけるために、上図を反時計回りに角度Φほど回転して標準形の双曲線グラフにする。
この形のとき成り立つ双曲線の性質(別稿「二次曲線の性質」2.(4)参照)を用いて

となる。これを前出の式に代入して整理すると
が得られる。これが欲しかった式です。
この中で重力定数G、木星質量M、侵入速度v0は全て与えられた値です。だから侵入距離pを調節すれば木星を通過した後に、探査機を任意の方向へ飛ばすことができる。侵入距離pの調整は、木星接近時にロケットエンジンを進行方向と垂直にごくわずか働かすことで実行できる。
スイングバイによる加速を最も効率良く引き出すには、角度θが何度で木星から離れていくようにすれば良いであろうか。それは1.で述べたように木星の進行方向にはじき飛ばされるようにするのが良い(下図)。つまり木星から離れていく探査機の速度ベクトルの方向を木星の公転速度の方向と一致させると最大の速度を得ることができる。
なぜなら、木星静止の座標系(ここで用いているもの)から太陽静止の座標系に移ると、探査機の速度ベクトルは、[木星静止座標での探査機の離脱速度ベクトル(大きさは初速v0と同じ)]+[木星の公転速度ベクトル(v=1.3×104m/s)]のベクトル和になるが、上記の場合、両速度ベクトルは同一方向での和になり、それ以外の方向の場合は、両速度ベクトルがつくる平行四辺形の対角線の大きさになるからです。
太陽静止系での探査機の速度ベクトルが、そのようになることを“ガリレオの相対性原理”は保証している。
太陽静止の座標系から見て、探査機がどのように動くかを知るには、まず木星静止の座標系の双曲線軌道上での位置を時間の関数として求める。そして次に、木星静止の座標系から太陽静止の座標系に移る。その座標上で木星をその公転速度ベクトルで移動させて、各時間の探査機の位置を、太陽静止の座標系上にプロットすればよい。そのとき探査機が木星近辺を移動している間の時間程度では、木星はほぼ等速度運動をしていると見なせる。
下図は木星から1天文単位離れた位置で13.1km/sの速度を持ち、その点と木星を結ぶ直線に対して木星の右0.1°〜0.5°の角度で侵入していく惑星探査機の軌道を木星静止の座標系で示している。それらは木星を経過した後、木星の進行方向に1天文単位離れた位置を通過するような位置関係で軌道を表示している。このとき大事なことは、木星の進行方向の後方で木星公転軌道を横切ることです。そうすると木星から運動量をもらうことができる。
このとき、木星の進行方向の速度成分で考えると、木星は加速する探査機の速度よりも早い速度で探査機を追い越していく事になります。そういった状況で探査機が木星より後方で木星軌道を横切るのです。
木星静止の座標系で見ると惑星探査機の速度の大きさは木星通過の前後で変化せず、単に完全弾性衝突であることを示しているにすぎない。しかし太陽静止の座標系で見ると明らかに惑星探査機は増速している。
この当たりの事情は、ちょうど1.(1)m1>>m2の場合において、m1静止の座標系から見るとm2のm1に対する相対速度の大きさが衝突の前後で変わらないのに、元の座標系で見るとm2の衝突後速度の大きさが衝突前相対速度の大きさにm1の速度を足したものになることに対応する。
[第3の鍵]は、探査機は、ほとんどの時間を太陽の重力場の中を飛行するということです。2.章の運動を木星静止の座標系から見ると探査機には何の得も無いように見えるが、太陽を中心とした太陽静止座標系から見ると話は変わってくる。2.章の議論から明らかなように、旨くやれば木星軌道の位置で木星の公転速度ベクトルの方向に木星公転速度の約二倍以上の速度を得ることができるのだから、太陽引力を振り切ってより遠くの惑星、さらに恒星空間に到達できることになる。
厳密言うと探査機は太陽の引力ポテンシャル場と木星の引力ポテンシャル場の重ね合わされたポテンシャル場の中を飛行する。その合成されたポテンシャル場の様子を下図に示す。
木星の質量は太陽の約1000分の1であるから、木星と太陽の距離の30分の1程度木星から離れれば木星の引力の影響はほとんどなくなる。(以下の計算参照)
太陽に対してほぼ円運動をする木星の軌道位置で、仮に木星の公転速度の2倍の速度を探査機が得たとすると、太陽の回りをその距離で円運動する為に必要な運動エネルギーの4倍の運動エネルギーを得たことになる。
円運動の場合の運動エネルギーの2倍(速度では21/2倍)を持てば無限の彼方まで飛び去る放物線軌道に移れる。それよりもさらに大きな運動エネルギーを得たのだから、探査機は太陽の重力圏を振り切ってはるか彼方の恒星空間へ飛び立つ、双曲線軌道に乗ったことになる。(別稿「質点の二次元運動」参照)
惑星探査機は地球を出発するときにロケットエンジンを用いてある速度まで加速するが、それ以後は微少な方向調製以外にはロケット燃料を使用しない慣性飛行で目的の惑星に飛んでいく。
外惑星探査のために1972年に打ち上げられた10号は初めて木星に、1973年打ち上げの11号は木星および初めて土星に接近してそれらの惑星の近接観測に成功した。
10号と11号は、主に木星によるスイングバイで増速することにより、最終的に恒星空間に旅発っていった。機体には、地球外生命体に遭遇することを想定して、太陽系や人類の様子を記した金属板を搭載した惑星探査機として有名。【パイオニア10号と11号に搭載された金属板】
10号と11号には原子力電池が積まれ、深宇宙でも動作する様に設計されており、観測後も信号を発していたが、11号は1995年11月の信号を最後に途絶した。10号はその後も信号を発しつづけたが遠ざかるにつれて電波が微弱過ぎて内容の解読ができなくなり、ついに2003年1月22日を最後に信号が途絶した。【パイオニア10号の構造】
スイングバイを利用して逆に減速する事も可能です。1.の解(3)の場合でm1が探査機、m2が惑星と見なせばよい。その具体的な例が1973年のマリナー10号の飛行である。マリナー10号は金星よりも速い速度で金星に追いついて行き、金星の進行方向の前方で金星軌道を横切る事で減速と軌道の方向修正を実現した。(下図)
1977年8月20日に地球を速度v=36km/sで出発した探査機ボイジャー2号は、スイングバイ航法により木星(10km/s→21km/s)と土星(16km/s→24km/s)で増速し、天王星と海王星を観測して恒星空間へ旅立った(下図)。この当たりの位置関係は天文ソフトmitakaで確かめることができる。
ボイジャーの解説
2017年9月に放映されたNHKコスミックフロントNEXT「コンピューターと呼ばれた女性たち」でボイジャーミッションの隠されたエピソード(引用した解説に書かれている事のさらなる詳細)が紹介されていますので、ご覧あれ。
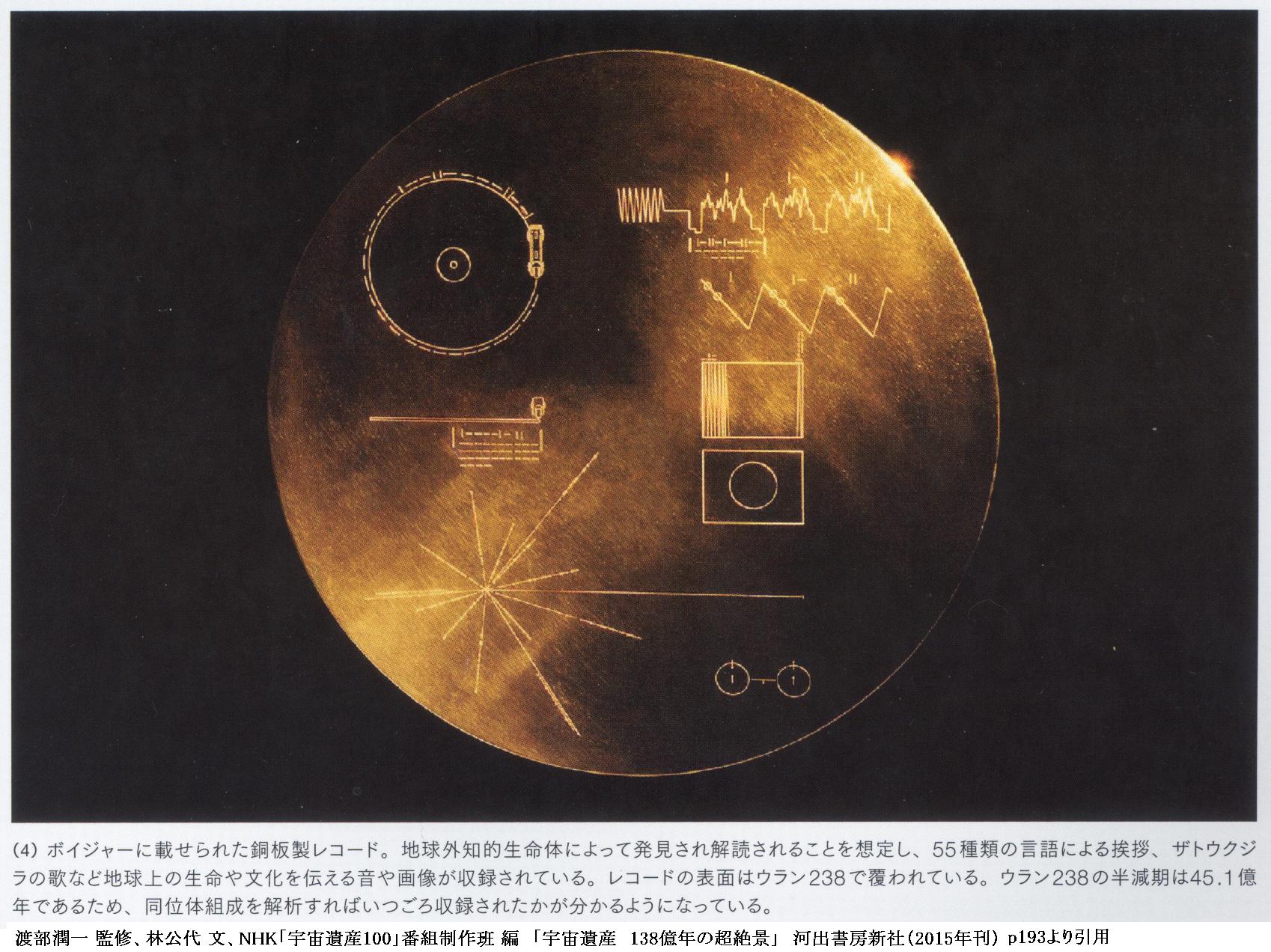
なお、ボイジャーには、パイオニアと同様に、他の惑星系の宇宙人に向けた“メッセージレコード”が搭載されている。
ちなみに海王星の公転軌道半径は30天文単位だから、地球から海王星までをホーマン軌道で移動させるとすると約30年かかる(下図参照)。しかしボイジャーはたったの12年で到着したのだからいかに効率よく増速されたかが解る。

以下に、地球、木星、土星、海王星について、それぞれの公転軌道半径の位置での太陽系脱出速度の計算値を参考に示す。上記のスイングバイにより獲得した速度と比較してみて欲しい。(詳しくは別稿「惑星探査機の軌道と飛行速度」参照)
“ひてん”は、日本がその後に目指していた惑星探査に必要な軌道技術の開発・習得する為に打ち上げられた実験衛星です。 “ひてん”をまず地球を焦点としかつ月まで届く細長い楕円軌道に載せます。そして“ひてん”が月軌道を横切るタイミングと月が“ひてん”の軌道を横切るタイミングを調整します。そして最初“ひてん”を月の後方を通過させる加速スイングバイを行い“ひてん”をより遠くの外に向かう軌道に載せます。そのとき遠地点高度と遠地点方向を制御します。そして次に、遠地点から地球に帰ってくる“ひてん”が月の軌道を横切るときに月の前方を横切るように調整して減速スイングバイを行います。これにより、遠地点から月を経由して地球に帰るスイングバイ軌道に乗せます。
つまり、近地点から月を経由し月の外に向かうスイングバイで遠地点高度と遠地点方向を制御し、遠地点から月を経由して地球に帰るスイングバイで、次回月スイングバイの決め手となる近地点の高度と方向を制御する。この遠地点-近地点の往復繰り返しながら月スイングバイを経由して軌道をどんどん変えて行く技術を習得した。

NHKが2021年3/4に放映したコスミック・フロントNEXT「惑星探査の先駆け “ひてん” 波瀾万丈の軌跡」で、このプロジェクトの詳細が紹介されていました。
さらなる詳細については下記URLをご覧下さい。
https://www.isas.jaxa.jp/j/isasnews/backnumber/1994/ISASnews154.pdf
下図は錯綜していて解りにくいが、S1〜S3までは、加速スイングバイだろう。そしてS4の減速スイングバイを経た後S5の加速スイングバイで磁気圏尾部1ヶ月停留軌道に投入したのだろう。その後S6の減速スイングバイで月との会合タイミングをはかり、S7の加速スイングバイて磁気圏微分3ヶ月軌道に投入したのだと思います。
その後、S8の減速スイングバイで減速して地球大気上層を通過するエアロブレーキ実験軌道に入り遠地点A16を経由した地球接近で第1回目のアエロブレーキを実施してA17遠地点到達軌道となり、その後2回目のエアロブレーキでA18遠地点到達軌道となったのでしょう。その後もう一回の周回(A19)を経てS9の加速スイングバイ実験に入った。
上図の磁気圏尾部1ヶ月停留軌道の楕円長半径は月の軌道半径とほぼ同じですから、ケプラーの第三法則から確かにこの軌道の周期は月の公転周期と同じ1ヶ月程度となることは納得できる。また磁気圏尾部3ヶ月停留軌道の公転周期が3ヶ月になるためには、ケプラーの第三法則から磁気圏尾部3ヶ月停留軌道の楕円長軸半径は月の軌道半径の2.08倍程度になる必要がありますが、ほぼその様になっています。
またこの軌道が8の字を描いていますが、上図は太陽と地球を結ぶ線を固定した座標系に描かれているので見かけ上その様に見えるだけで、実際は楕円軌道です。このことは次図の遠地点A20をとる軌道に付いても言えることです。
さらに補足しますと、この太陽と地球を結ぶ線を固定した座標系ではS1〜S3までの軌道は右回りに遷移していますが、太陽静止の座標から見るとむしろ左回りに少し回転していくはずです。
そのため、これらの図が採用している座標系はスイングバイ航法を理解するにはあまり適切ではありません。
上図は下記で説明されている“非常に少ない燃料で月周回軌道に到達できる航路を実証するため”の軌道です。実際、遠地点がA18、A19へ到達するには、地球出発時に最もエネルギー消費の少ないホーマン軌道で出発するのですが、月軌道まで到達したとき、月の公転軌道に移るにはそこでロケットエンジンを働かせて月の公転速度まで加速しなければ成りません。そのためこの方法では月軌道に移るためにかなりエネルギーが必要です。
そのため上図の様にS9の加速スイングバイで加速し、そしてS10の減速スイングバイを旨く使うことで月の公転軌道に移るほうがエネルギー消費が少なくできる。上図はこのことを検証することを目的とした軌道です。
“ひてん”打上げ後、1990年3月19日に月を利用した最初のスイングバイを行い、孫衛星“はごろも”を分離して月の周回軌道に投入した。装置の故障で軌道投入の確認ができなかったが、周回軌道にのる時のロケットの光を国立天文台木曽観測所がとらえたことで、成功したと推定されている。
その後1991年10月にかけて、加減速を伴うスイングバイを合計10回行っている。5回目のスイングバイでは後のGEOTAILと同様の高度135万
km に一時停留する軌道に試験的に投入された。
1991年3月には世界初の試みとして、地球大気を使って減速し軌道を変更するエアロブレーキの実験を2回行った。
さらに追加ミッションとして、非常に少ない燃料で月周回軌道に到達できる航路を実証するため、9回目のスイングバイでいったん地球から153万 km まで離れ、地球引力圏の境界付近に到達した。そこで太陽からの引力を利用して近地点高度を上昇させ、10回目のスイングバイで月の公転軌道に近い軌道に乗った。
この後“ひてん”は1992年2月15日に11回目の月接近で月の周回軌道にはいった。1993年4月10日に月のステヴィヌス・クレーターとフレネリウス・クレーターの間に落下・衝突して計画は終了した。
“ひてん”の運用によって得られたスイングバイ航法の技術は、この後打上げられた“磁気圏観測衛星GEOTAIL(ジオテイル)”、火星探査機“のぞみ”、工学実験探査機“はやぶさ”等の運用に活かされている。
1989年10月18日に、アトランティス (STS-34) のペイロードベイ(貨物室)に搭載されて打ち上げられた。低軌道までスペースシャトルで上がった後に、ペイロードベイから探査機を放出した。オービタが充分に安全な距離をとって離れたあと、探査機を載せたIUSに点火、地球周回軌道を離れて最終的に木星へと至る旅に出発した。
1990年2月10日に金星スイングバイ、1990年12月8日に1回目の地球スイングバイ、1991年4月11日に高利得アンテナの展開に失敗して、別の小型アンテナで通信する事になる。
1991年10月29日に小惑星ガスプラに接近観測、1992年12月8日に2回目の地球スイングバイ、1993年8月28日に小惑星イダに接近観測、1994年7月21日にシューメーカー・レヴィ第9彗星の木星衝突を観測。
1995年7月13日、プローブを切り離し。
1995年12月7日、プローブが木星大気圏に突入し、57分後に通信途絶するまでデータを送り続けた。また同日、オービターも木星の周回軌道に入り、それから7年余りに渡って木星や各ガリレオ衛星、アマルテアなどへの接近観測を繰り返す。
2000年12月、土星探査機カッシーニが木星スイングバイを行う際に木星の磁気圏を共同観測する「ジョイント・ミッション」を行う。2003年9月21日、当初の予定よりはるかに長期間のミッションを経て、木星大気圏に突入した。これは姿勢制御用燃料の尽きた探査機が木星の衛星(特に生物存在の可能性があるエウロパなど)に落下して探査機由来の地球微生物などで衛星環境が汚染される事を避けるため。
詳細は、2021年5/13放送の「NHKコスミックフロントNEXT“冒険者達が語る太陽形のヒミツ 木星”」などをご覧下さい。
 ゎり
ゎり
カッシーニ (Cassini-Huygens) は、アメリカ航空宇宙局(NASA)と欧州宇宙機関(ESA)によって開発され、1997年10月15日に打上げられ、2017年9月15日まで運用されたた土星探査機です。
カッシーニは、金星→金星→地球→木星の順に合計4回のスイングバイを行なって2004年7月1日に土星軌道に到着した。
カッシーニには惑星探査機ホイヘンス・プローブ (2.7 m、320 kg) が搭載されており、2005年1月15日にタイタンでカッシーニより切り離されてタイタンに着陸し、大気の組成・風速・気温・気圧等を直接観測した。
2014年6月30日に土星軌道投入から10周年を達成。2016年から始まる最後のミッションとして「グランドフィナーレ」と呼ぶミッションフェーズに移行することが発表された。このミッションでは土星の北極上空を通過してFリングのすぐ外を通過する軌道を繰り返し周回しながら観測を行う。2017年4月26日に、土星と環の間を、人類の探査機として初めて通過。
2017年9月15日、日本時間19時32分、カッシーニ本体を土星大気に突入させて運用を終了。土星に落下させたのは、探査機が木星衛星に落下して探査機由来の微生物が衛星環境を汚染するのを防ぐためです。
詳細は、2021年7/15放送の「NHKコスミックフロントNEXT“冒険者達が語る太陽形のヒミツ 土星”」などをご覧下さい。
{kind=link}
{kind=link}
{kind=link}
{kind=link}